A significant contribution has been made to the development of multi-robot cooperative methodologies for Wilderness Search and Rescue (WiSAR). WiSAR involves the search for a possibly mobile but non-trackable lost person (i.e., the target) in wilderness environments. We have proposed a methodology that can autonomously coordinate the search strategy of a multi-robot team in wilderness environments by using very limited knowledge of the target, and by employing readily available information like terrain data to conduct the search.
In order to execute the search, three issues are addressed: (i) target-location prediction, (ii) robot deployment, and (iii) robot-path planning.
(i) Target-location prediction focuses on developing a probabilistic model using probability density functions (PDF’s) to “guess” where the target is currently located, and where it might be headed. One PDF is overlaid along a direction, or “ray”, and the boundaries for locating the target within certain probabilities are defined as “iso-probability curves”. The nature of this one-dimensional PDF makes the time & space propagation of the iso-probability curves computational friendly. The curves adapt to both terrain topology, as well as target psychology and physiology. In addition, domain expert knowledge can also be used to orient the curve in likely directions of travel.
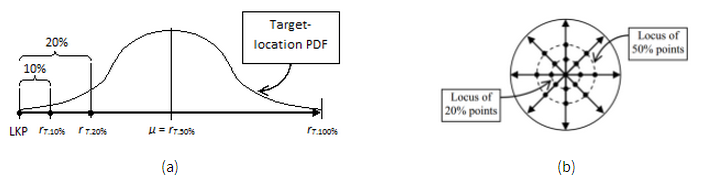
Figure 1. Basic iso-probability curve construction. (a) Side-view: cumulative probability (control) points along a ray, (b) Top-view: loci of iso-probability control points among 8 rays.
Source: Macwan, Ashish, Goldie Nejat, and Beno Benhabib. “Optimal deployment of robotic teams for autonomous wilderness search and rescue.” Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on. IEEE, 2011.
(ii) Robot deployment is the second part of the methodology which envisions an optimal distribution of search effort using iso-probability curves. During the search, the optimal deployment of robots is re-computed regularly and in an efficient manner in order to guarantee the optimality of the search as it progresses. Re-deployment also takes into account the discovery of clues dropped by the target in order to re-focus the search effort around these clues.
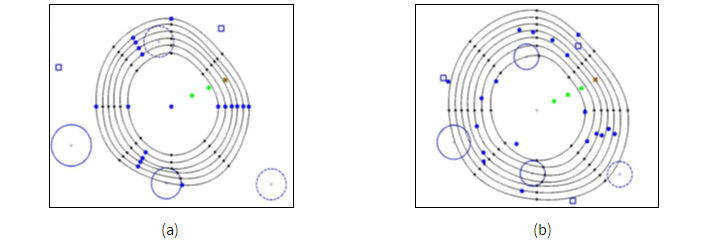
Figure 2. Deployment example using iso-probability curves. (a) Optimal deployment solution at time t = 1800 s, (b) Implementation of new optimal deployment solution at time t = 2400 s.
Source: Macwan, Ashish, Goldie Nejat, and Beno Benhabib. “Optimal deployment of robotic teams for autonomous wilderness search and rescue.” Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on. IEEE, 2011.
(iii) Robot-path planning is introduced to guide the robots during the search and guarantee that the robots follow their respective iso-probability curves and hence, remain optimally distributed. The path-planning methodology takes into account terrain data, and adapts to both a priori known and unknown obstacles found along the paths. The planned paths are re-computed regularly in order to check their viability and the method provides alternative routes in case robots fall behind due to terrain conditions or during obstacle avoidance.
Further work has been done on making use of static sensors in support of mobile searchers for increasing the likelihood of detection of the target. The developed strategy for planning and executing a deployment is both optimal and adaptive to have the maximum likelihood of target detection while being able to adjust for new target location information becoming available during deployment (such as a clue-find). This is achieved through the time-phased deployment of sensors which are each optimal for their time of deployment. Here, optimality is defined as the time cumulative likelihood of detecting a target and deployment locations are on iso-cumulative curves, time cumulative analogs of the iso-probability curve.
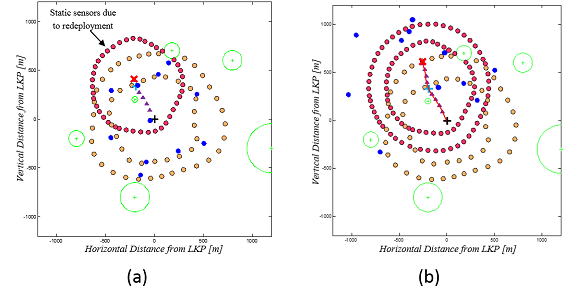
Figure 3. Static sensor deployment example. (a) A deployment immediately after a clue-find (new information) during the search at the blue cross by a mobile searcher, (b) the same search some time later when the target is found by a static sensor, the second ring of red sensors was deployed sometime between the first ring being deployed and the target being found according to the time-phased deployment of sensors.