Piezoelectric based linear ultrasonic motors (LUSM) are chosen to actuate the 5-axis desktop scale meso-milling machine tool, currently being developed in the CIMLab. Comparing to conventional electromagnetic actuators, LUSMs have closed-loop positioning accuracies in the nanometer range. They are also compact in size, quick in response, free from magnetic influence and exhibit holding force without external input.
In the literature, the LUSM stator performances are evaluated in a simulated environment, whereas the actuator output performances are determined mostly through physical prototyping. In this project, a novel methodology was developed for evaluating both stator and actuator-based performance parameters in a simulated environment. A key feature of the methodology is the consideration of the LUSM stator in its operating environment, under contact with adjacent components. The objective of the methodology is to provide an accurate evaluation of the actuator output performances as it behaves in its operating environment. The performance results can then be used in the design optimization of LUSMs. This methodology also lays the foundation to the current CIMLab research focus, which is on the development of a methodology to improve the actuator output performances, such as the output force density.
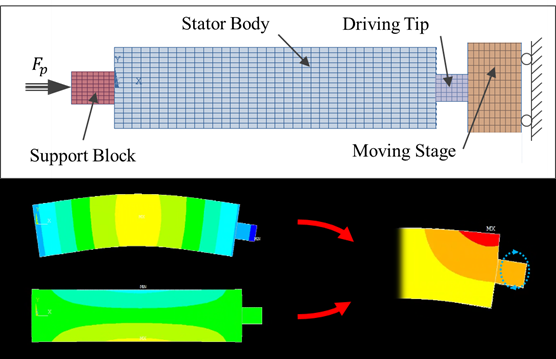
Figure 1. Configuration and Vibration Modes of a Linear Ultrasonic Motor