The goal of this CANRIMT project is to develop methodologies regarding modeling of structural dynamics, dynamic stiffness, and active control of unwanted vibrations in Parallel Kinematic Mechanisms (PKMs) as a result of flexibility of the linkages, with applications to meso-Milling Machine Tools (mMTs) for 5-axis machining of meso-scale parts.
In this regard, a number of research issues that have been addressed are summarized below:
- Regarding the structural dynamics of PKMs with flexible links, a new set of admissible shape functions for the flexible links has been proposed to incorporate the dynamic effects of the structural components adjacent to the links.
- An FE-based methodology has been presented for the estimation of the configuration-dependent PKM structural dynamic properties at the Tool Center Point (TCP). The model has been validated via experimental modal tests conducted on two PKM-based meso-Milling Machine Tool (mMT) prototypes built in the CIMLab (Figure 1).
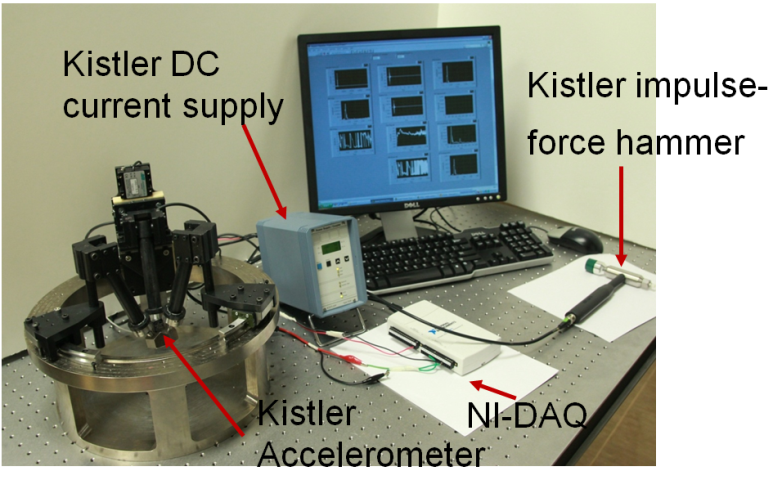 Figure 1. Experimental Modal Test of the PKM Prototype in the CIMLab
Figure 1. Experimental Modal Test of the PKM Prototype in the CIMLab
The following videos show the first three mode shapes of a PKM prototype built in the CIMLab:
Video 1. 1st Mode Shape
Video 2. 2nd Mode Shape
Video 3. 3rd Mode Shape
- A set of PZT transducers have been designed, and bonded to the flexible linkage of the PKM to form a “smart link” as shown in Figure 2. A new control scheme having robust characteristics has been designed and synthesized with the flexible PKM linkages. Following, using LabVIEW Real-Time module, the active vibration control system has been experimentally implemented on the smart link of the PKM (Figure 3).
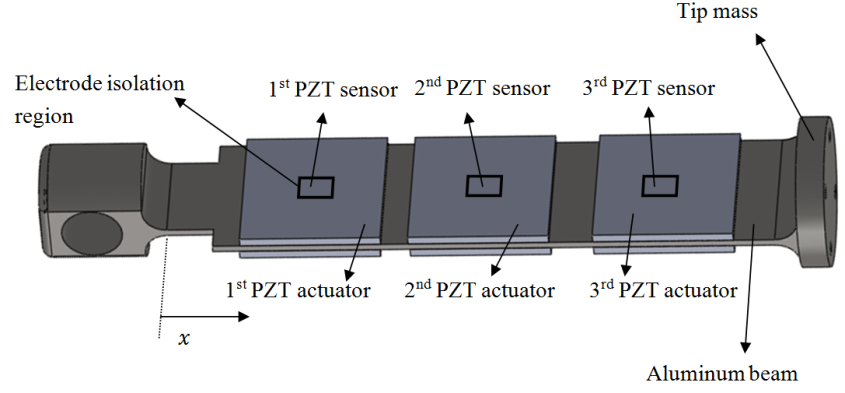
Figure 2. PZT Transducer Configuration of the Smart Link
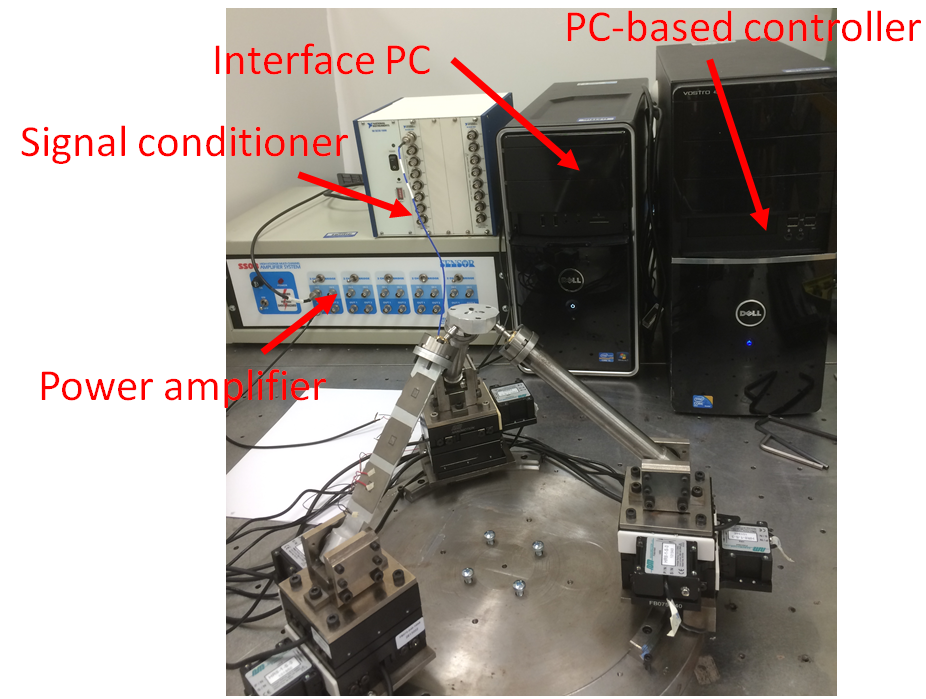
Figure 3. Experimental Set-up of The Active Vibration Control System