Under the CANRIMT project, a 5-axis desktop scale meso-milling machine tool (mMT) design concept had been proposed in the CIMLab as a solution to manufacture complex 3D meso-scale workpieces (0.5 to 5.0 mm in size). The mMT is based on a six degree-of-freedom (dof) spatial parallel kinematic mechanism (PKM), which offers higher structural stiffness and lower error accumulation over serial mechanisms.
In this project, a novel rigid body control design methodology is developed for spatial PKMs in general. The primary control challenge for PKMs is the synchronization of active joint motions. This is addressed through the formulation of novel task-space contour errors and lag errors as a set of design specifications. Robustness to external disturbances and model parameter variations is also formulated as an additional design specification. Given that these design specifications exhibit the property of convexity, they can be satisfied simultaneously through the application of a convex combination controller design approach. Finally, the applied dynamic modeling approach allows the control design methodology to be extended to 6 dof spatial PKMs.
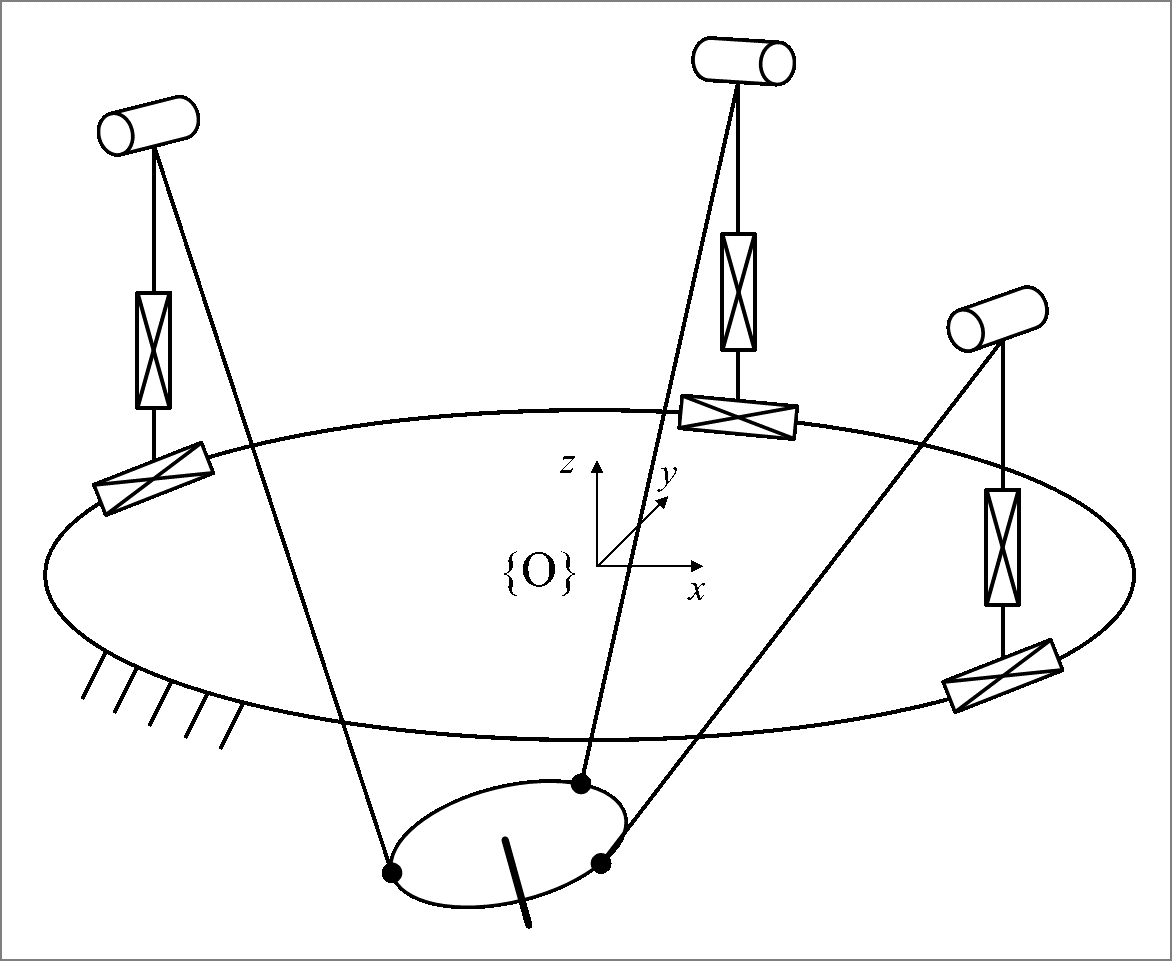
Figure 1. Representative 3-PPRS PKM Configuration