Robotic swarms are inspired from naturally found self-organizing systems such as ant colonies and schools of fish, where individual behaviors aggregate to produce complex global emergent behaviors. Such a robotic platform, mROBerTO (milli-ROBot-TOronto), was developed in our Lab for the implementation and study of swarm robotic systems (SRSs). The emphasis has been on decentralized control and tight inter-robot coordination since SRSs are commonly composed of robots that only use local information obtained from their immediate neighbors and environment to complete complex tasks that they cannot perform individually.
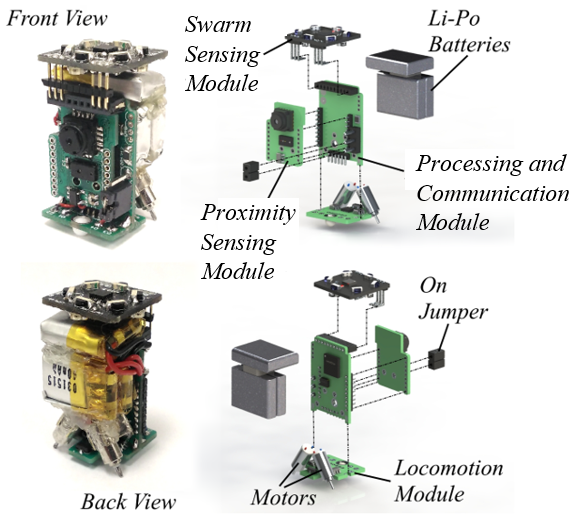
mROBerTO is a 16mm×16mm robotic platform that comprises four modules, Figure 1. It is equipped with a nRF51422 system on a chip (SoC) with a 32-bit ARM Cortex-M0, located on its Processing and Communication Module. Additionally, the SoC has build in Bluetooth Low Energy (BLE) and ANT communication capabilities. mROBerTO can traverse its environment using two miniature brushed DC motors on its Locomotion Module. It can also sense and communicate with other robots using the IR transmitters and receivers placed on its Swarm Sensing Module.
mROBerTO has been used for implementing swarm behaviors such as aggregation, chain formation, collective exploration and dynamic task allocation. A brief video of mROBerTO’s capabilities is shown below.
Published in: Justin Yonghui Kim, Tyler Colaco, Zendai Kashino, Goldie Nejat, and Beno Benhabib. “mROBerTO: A Modular Millirobot for Swarm-Behavior Studies,” 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2109-2114.
Funding Source: This research is funded by the Natural Science and Engineering Research Council of Canada.