Our earlier research on target interception with robot teams started with the development of navigation theory for interception. We designed an advanced guidance-based rendezvous methodology to allow an autonomous vehicle to accurately and safely maneuver in the presence of dynamic obstacles on realistic terrains. It addressed not only the problem of interception but also the problem of rendezvous (i.e. velocity matching). Furthermore, dynamic obstacles with unpredictable trajectories were considered, as well as unstructured indoor terrains.
The navigation methodology was implemented by first determining rendezvous maneuvers using the Advanced Predictive Guidance Law (APG). Afterwards, the terrain navigation algorithm determined a safe path through a realistic terrain that also minimized the rendezvous time.
The methodology was validated in a real setup with an analog charge coupled device camera and Miabot Pro wireless robot models. The experiments determined the time efficiency of the proposed rendezvous method on realistic terrains, and it was also shown to be robust to noisy measurements.
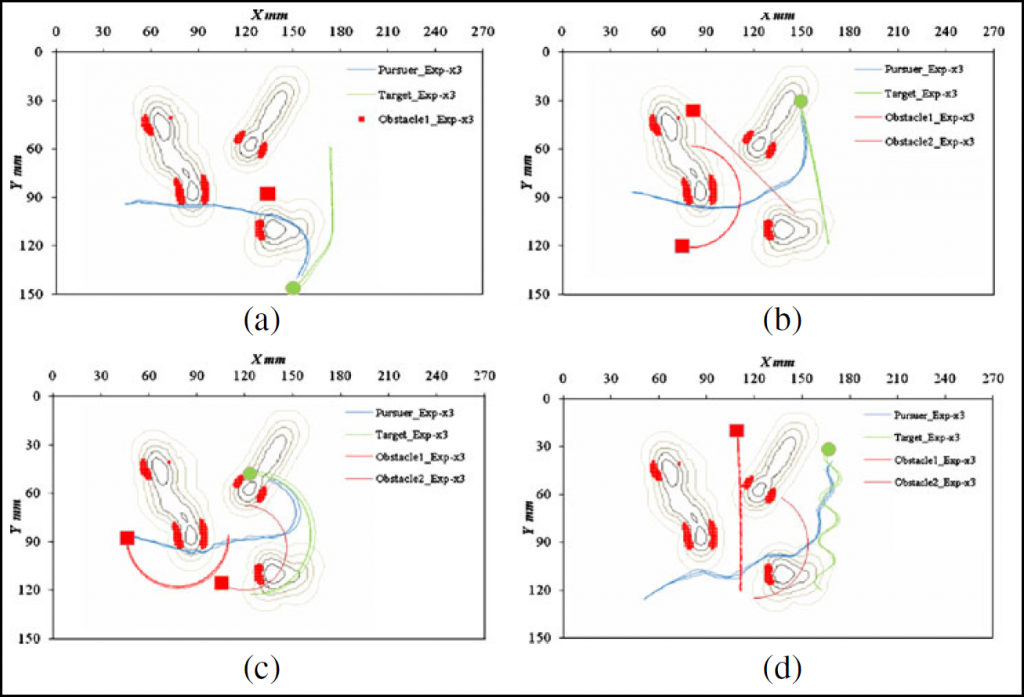
Figure 1. (a) Experiments with static target, (b) dynamic obstacles and dynamic target moving in straight line,
(c) dynamic obstacles and dynamic target moving on a circular trajectory, and (d) dynamic obstacle and target moving on a sinusoidal trajectory.
Source: F. Kunwar, P. K. Sheridan, and B. Benhabib, “Predictive Guidance-Based Navigation for Mobile Robots: A Novel Strategy for Target Interception on Realistic Terrains,” Journal of Intelligent Robotic Systems, vol. 59, pp. 367-398, 2010.
Later on, we expanded this theory to the interception of a group of mobile targets by a dynamic team of robotic pursuers. The targets were assumed to be highly maneuverable with a priori unknown, but real-time trackable, motion trajectories. This was accomplished through the use of a Dynamic Re-Pairing Methodology (DRPM). Furthermore, the Dynamic Nearest Neighbor (DNN) Policy was proposed for the operation of a fleet of vehicles in a city-like application of the dial-a-ride problem.
Experiments in both simulated and real-environment verified that the DNN policy performed better than the first-come-first-served and nearest neighbor policies in minimizing customer mean system time. In addition, the DRPM was also shown to be tangibly efficient in the optimal dynamic re-pairing of multiple mobile pursuers to multiple mobile targets for minimum total interception time.
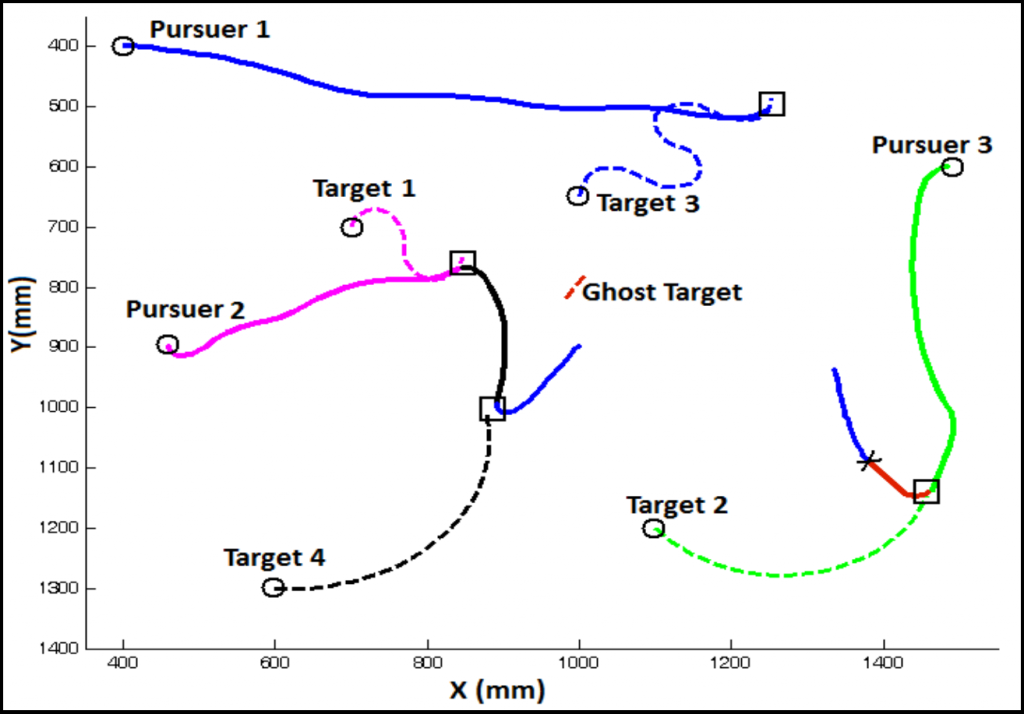
Figure 2. Pursuer Trajectories for the Maneuverable Targets Simulation.
Source: Sheridan, Patricia K., et al. “On-line task allocation for the robotic interception of multiple targets in dynamic settings.” Advanced Intelligent Mechatronics (AIM), 2010 IEEE/ASME International Conference on. IEEE, 2010.