The CIMLab has been heavily involved in active surveillance research, originating from 1999 to the present date. The inaugural research project focused on sensor planning techniques for surveillance of a single maneuvering target with multiple mobile sensors. Given a priori data about the expected target trajectories, offline optimization was used to determine best initial sensor pose and settings. Then, in real time, the systems updated sensor pose, reacting to object motion. This system resulted in improved surveillance tracking through maneuvering sensors into near-optimal positions, error reduction through sensor-data fusion, and proactive placement of unassigned sensors.
The following research project focused on the development of a real-time reconfiguration system for a multiple sensor surveillance system of multi-object dynamic environments. The system handled a single object of interest with multiple static or dynamic obstacles in the workspace. The framework was composed of multiple sensor agents, and a pair of referee and judge agents. Each agent was responsible for maximizing their own performance while following a global set of rules. The system was able to successfully track a priori unknown target trajectories while decreasing uncertainty in target pose through sensor fusion.
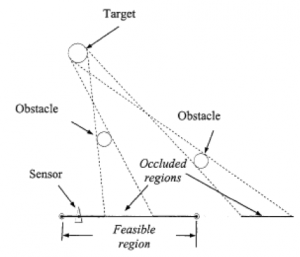
Figure 1. Sensor Placement Problem
The general sensor placement problem in active surveillance is shown in figure 1. Typically, a target for surveillance maneuvers through an environment, and the sensor(s) must reposition to maximize visibility while considering the target’s trajectory and obstacles present in the workspace.
The experimental setup designed for the CIMLab’s research validation is composed of four cameras mounted on translating and rotary stages, and a single target mounted on two perpendicular translational stages. A static overhead camera has been used for tracking purposes in past projects. Figure 2 presents the up to date project workspace.
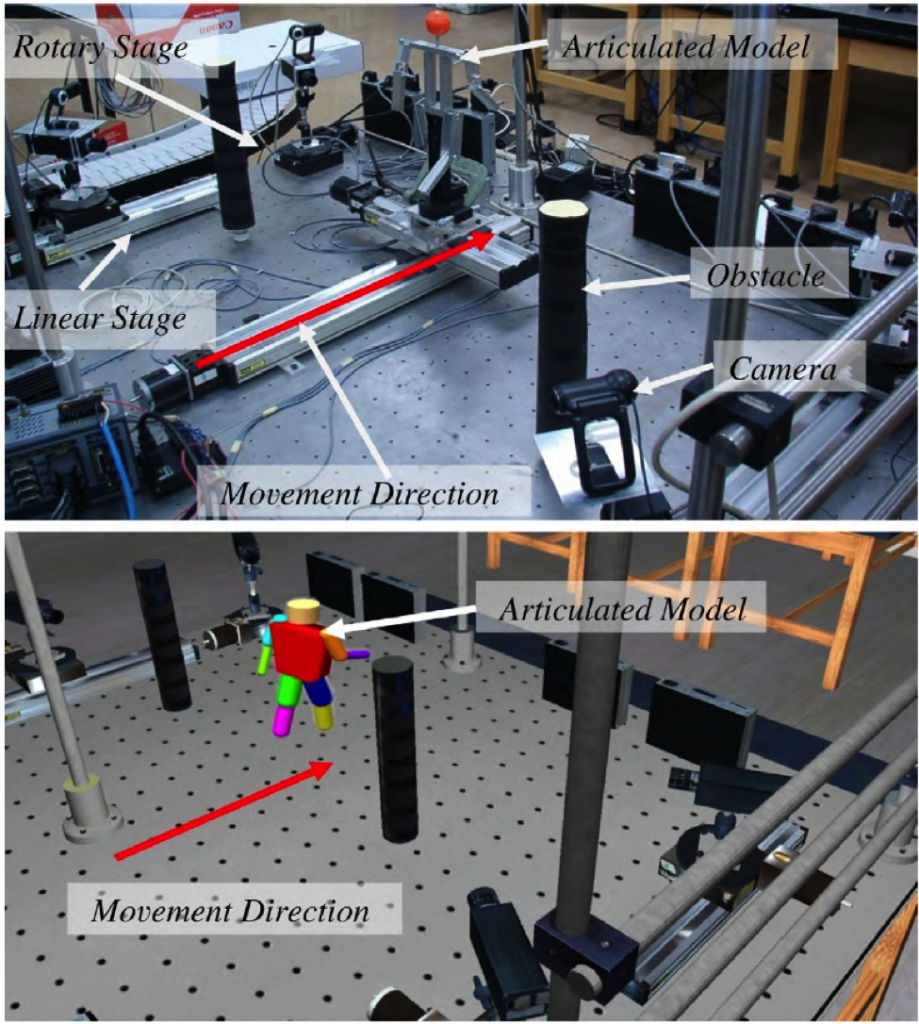
Figure 2. Experimental & Simulated Target and Workspace for Multi-Camera Surveillance
The third research project developed a method for surveillance and recognition of time-varying geometry (TVG). A multi-camera active-vision system was studied for improving visibility of shape recovery of the TVG. An algorithm was developed for real-time camera reconfigurations which significantly improved TVG action sensing performance in an obstacle-laden environment when compared to static and limited-motion systems. The system was successfully tested in real-time with an articulated human object, and produced improved action recognition results compared to static camera systems.
The latest CIMLab research is focused on active surveillance for improved shape recovery and motion capture techniques through camera reconfiguration. On-line optimization for camera placement has been developed for the motion capture of deformable objects. Kalman filters were integrated for predictive tracking and handling of self-occlusions and obstacle occlusions.
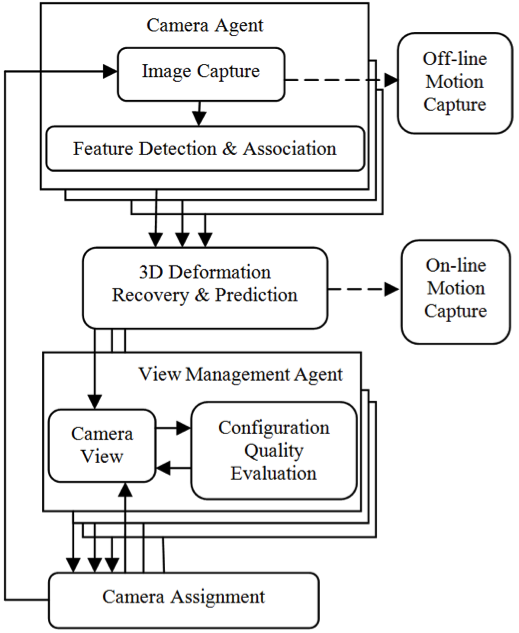
Figure 3. Reconfiguration Framework
The reconfiguration framework is presented in figure 3, and follows the common structure of previous research. The system was composed of camera agents and view management agents, each responsible for the capture of images, and planning the next best camera pose. The system was able to improve shape recovery accuracy of deformable objects in dynamic environments through active camera reconfiguration compared to static and limited motion cameras.