The growth in demand for 3D sculptured meso-scale parts, and the unique machining requirements of such parts, calls for meso machine-tools (mMTs) that can provide higher accuracy and stiffness. Parallel kinematic mechanisms (PKMs) are well suited for high-accuracy applications. However, constraints such as end-effector rotation (i.e., platform tilt angle) and configuration-dependent stiffness often limit their usage. Following an analysis on the performance of different PKMs, a new six degree-of-freedom (dof) PKM architecture based on a 3×PPRS topology (UofT PKM), which can achieve high end-effector tilt angles with enhanced stiffness, was developed in our laboratory. In order to enhance performance further, we have designed and built a redundant mMT, which is based on theUofT PKM (Fig. 1). In conjunction with the work on 3-strut PKM structures, we have also explored the possibility of using 5-struct architectures, such as the pentapod. However, since its workspace coverage is limited, we designed a new 6-dof 4×SPRR+1×PSPRR redundant pentapod (Fig. 2).
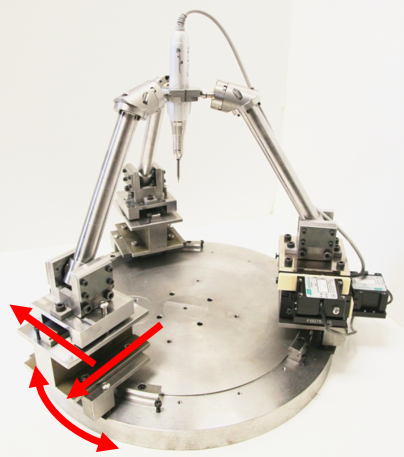
Figure 1. 3×PPPRS Redundant Reconfigurable meso-Milling Machine Tool
Our research on redundant PKMs based mechanisms led us to explore other designs of redundant reconfigurable machine tools (RRMTs) in which reconfigurability can be manifested through topological and geometric reconfiguration, without disassembly of the structure. In order to design an RRMT with all of its dof already included, a novel multi–tiered optimization based design methodology that combines synthesis and design was developed. The multi-tiered optimization comprises an iterative process that transfers decisions, which are generally taken throughout the design process, to a lower or upper tier to improve the overall result.
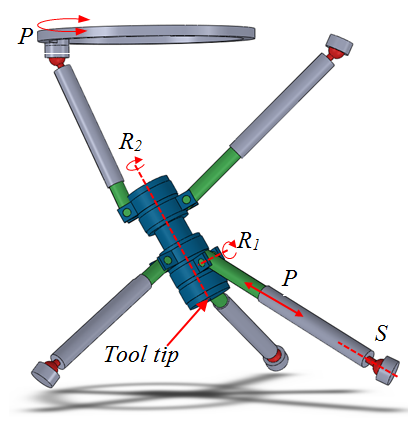
Figure 2. 6-dof pentapod-based PKM
The applicability of the proposed methodology was demonstrated through a design test case of a PKM-based redundant reconfigurable meso-milling machine tool (RRmMT) that can attain high stiffness while satisfying the high feed-rate requirement. The result is a new 3×PRPRS RRmMT that can be reconfigured into lower mobility sub-configurations, assembly/working mode configurations, and different PKMs without disassembly of the structure (Fig. 3).
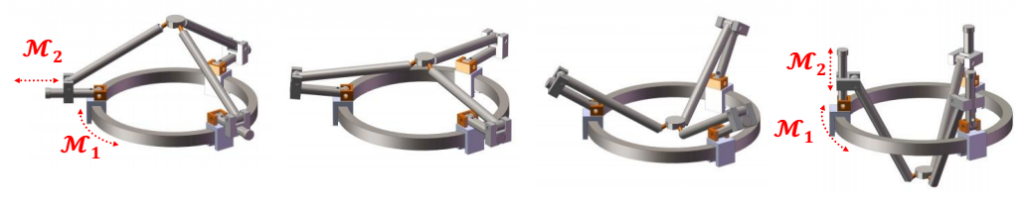
Figure 3. Reconfiguration of the 3×PRPRS RRmMT from the UofT PKM to the Eclipse PKM